


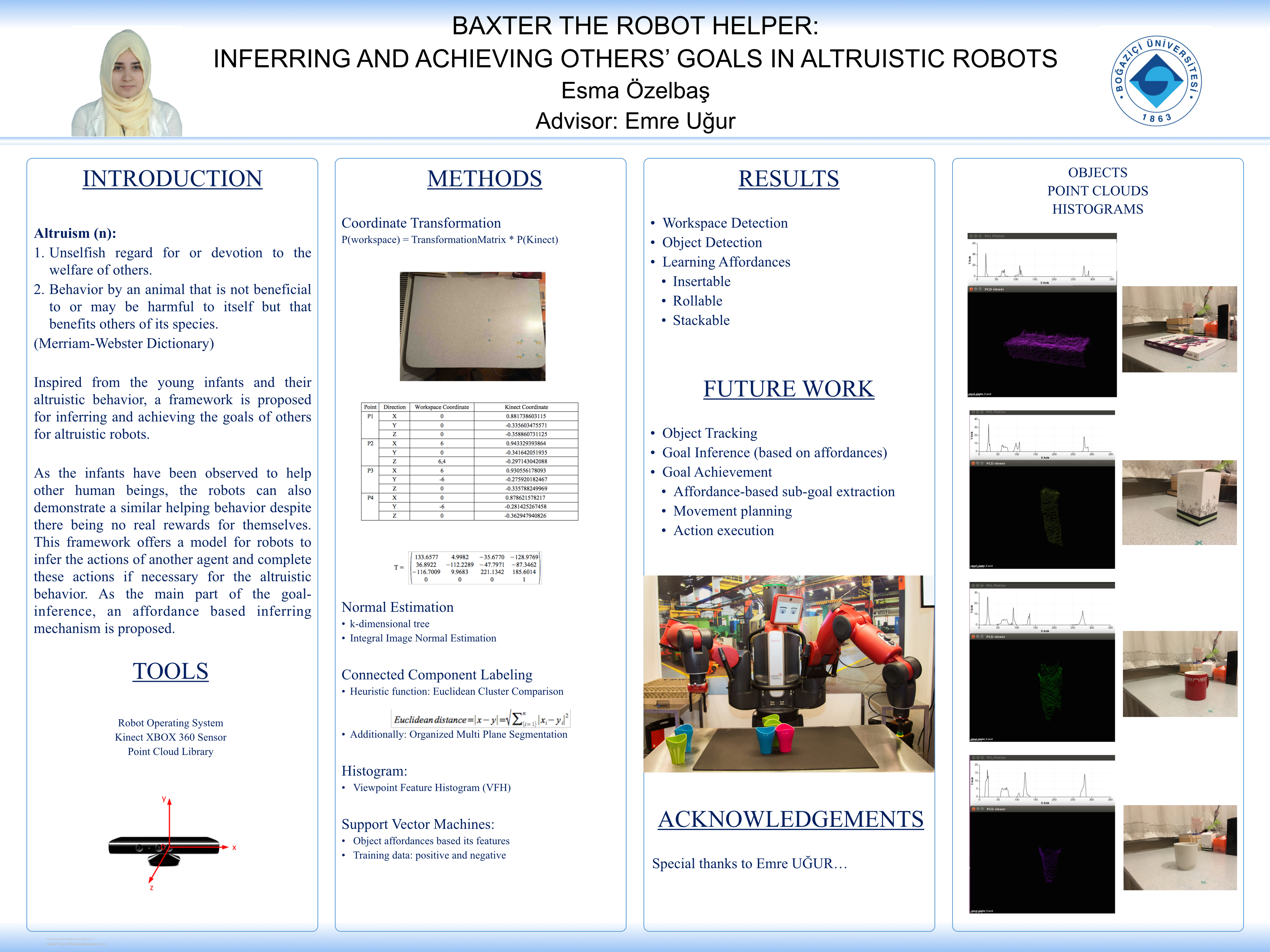
Baxter the Robot Helper: Inferring and Achieving Others' Goals in Altrustic Robots
Altruism (n): (Merriam-Webster Dictionary)
1. unselfish regard for or devotion to the welfare of others,
2. 2. behavior by an animal that is not beneficial to or may be harmful to itself but that benefits others of its species.
Inspired from the young infants and their altruistic behavior, we propose a framework for inferring and achieving the goals of others for altruistic robots. As the infants have been observed to help other human beings or even spherical objects as showcased by recent experiments, the robots can also demonstrate a similar helping behavior despite there being no real rewards for themselves. This framework offers a model for robots to infer the actions of another agent and complete these actions if necessary for altruistic behavior. As the main part of the goal-inference, an affordance based inferring mechanism is proposed.
Project Poster:
Project Members:
Project Advisor:
Project Status:
Project Year:
- Fall